Kebanyakan kit robotik pemula di pasaran hari ini lebih menekankan aspek elektronik dan perisian(software), manakala bahagian mekanikal pula direka sangat ringkas. Hal ini sememangnya masuk akal kerana tujuan utama kit-kit ini adalah untuk mengajar asas menulis kod dan penggunaan komponen elektronik.
Namun, robotik bukanlah terhad kepada kod dan litar semata-mata. Bahagian mekanikal juga sama pentingnya, dan pada pandangan saya, sebuah kit robotik sepatutnya kelihatan menarik dan menyeronokkan untuk digunakan.
Oleh itu, tujuan utama saya dalam projek ini adalah untuk menghasilkan robot bertrek cetakan 3D DIY yang bukan sekadar berfungsi, tetapi juga menarik secara visual — sesuatu yang lebih mengujakan berbanding kit robotik pemula yang biasa di pasaran.
Kit robot yang ada di pasaran. Satu papan ringkas, komponen yang terdedah dan wayar yang berserabut.
Apakah Yang Menjadikan Robot Itu, Robot?
Secara ringkasnya, robot ialah sebuah mesin yang boleh “berfikir” sendiri.
Kereta kawalan jauh mempunyai motor dan servo, tetapi ia hanya bergerak bila kita tekan butang. Tanpa kita mengawalnya, ia tidak akan buat apa-apa.
Robot pula berbeza kerana ia mengikut program. Bila kita hidupkan robot, ia akan jalankan kod dalam “kepalanya” (mikropengawal atau dalam Bahasa Inggeris dipanggil microcontroller) yang menentukan apa tindakan seterusnya.
Sebagai contoh:
Jika diprogramkan untuk bergerak ke depan selagi tiada halangan dalam jarak 50 mm, ia akan terus bergerak.
Sebaik sahaja sensor ultrasonik mengesan objek lebih dekat daripada 50 mm, kod tersebut akan arahkan robot untuk berhenti secara automatik — tanpa kita perlu gunakan alat kawalan jauh.
Itulah yang membezakan robot dan mesin biasa: keupayaan untuk bertindak berdasarkan logik yang diprogramkan dan maklum balas daripada sensor.
Komponen Teras Robot
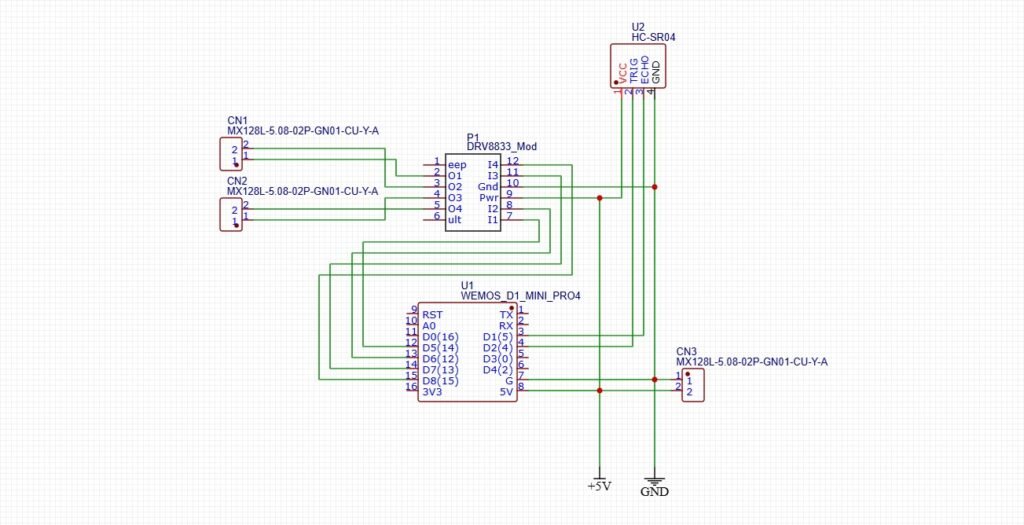
Mikropengawal (Microcontroller, bertindak sebagai otak robot)
WeMos D1 Mini → menjalankan kod robot
Penggerak (Actuators)
2× Motor DC → menggerakkan trek
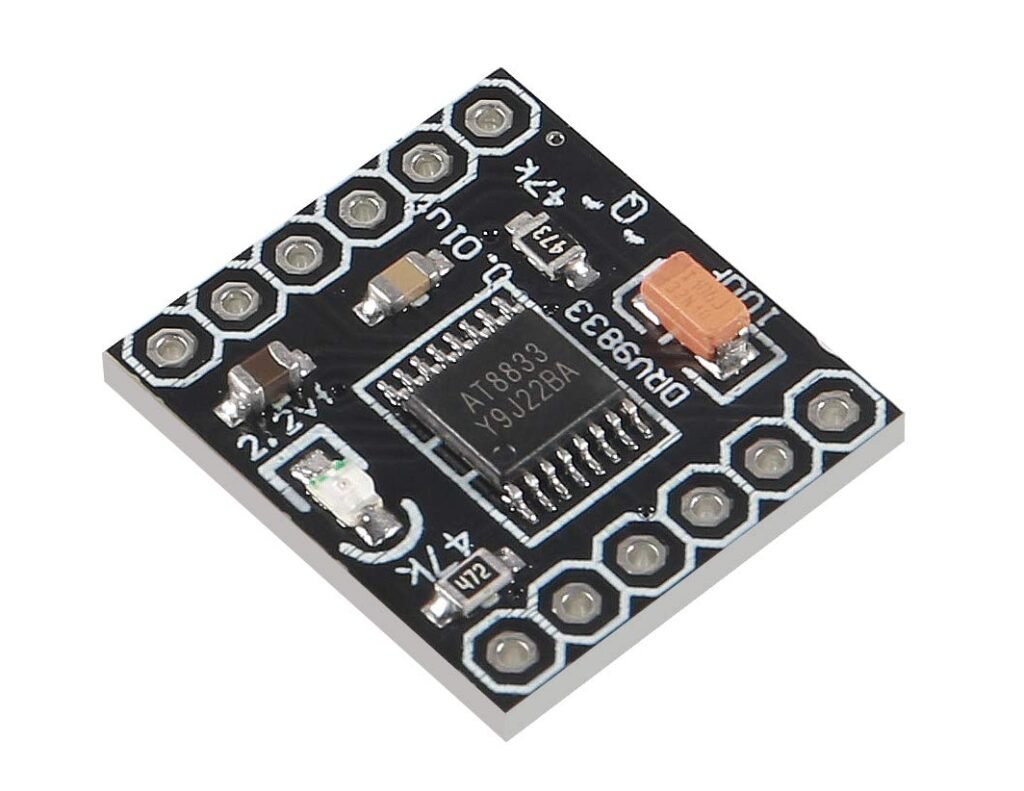
Pemandu Motor (Motor Driver)
DRV8833 → mengawal arus & kelajuan motor DC
Sensor
HC-SR04 Ultrasonic Sensor → mengesan halangan di hadapan
Sumber Kuasa
Bateri LiPo 3.7V 2000 mAh → sumber tenaga boleh dicas semula
WeMos D1 Mini
Motor DC
DRV8833
HC-SR04
Bateri LiPo
Komponen Tambahan
XL6009 Boost Converter → menaikkan voltan bateri 3.7 V kepada ~5 V, iaitu voltan yang diperlukan oleh kebanyakan komponen.
TP4056 Charging Module → membolehkan bateri dicas menggunakan kabel USB-C.
Suis Kuasa → memudahkan saya memutuskan atau menghidupkan kuasa dengan cepat.
Dan semestinya, untuk menggabungkan semua komponen ini, kita perlukan bahagian mekanikal seperti badan, rangka dan penutup. Di sinilah aspek rekabentuk mekanikal menjadi sangat penting.
Rekabentuk Mekanikal
Saya inginkan robot ini kelihatan seperti kereta kebal mini, kerana bagi saya kereta kebal memang nampak sangat menarik, terutamanya reka bentuk trek kereta kebal.
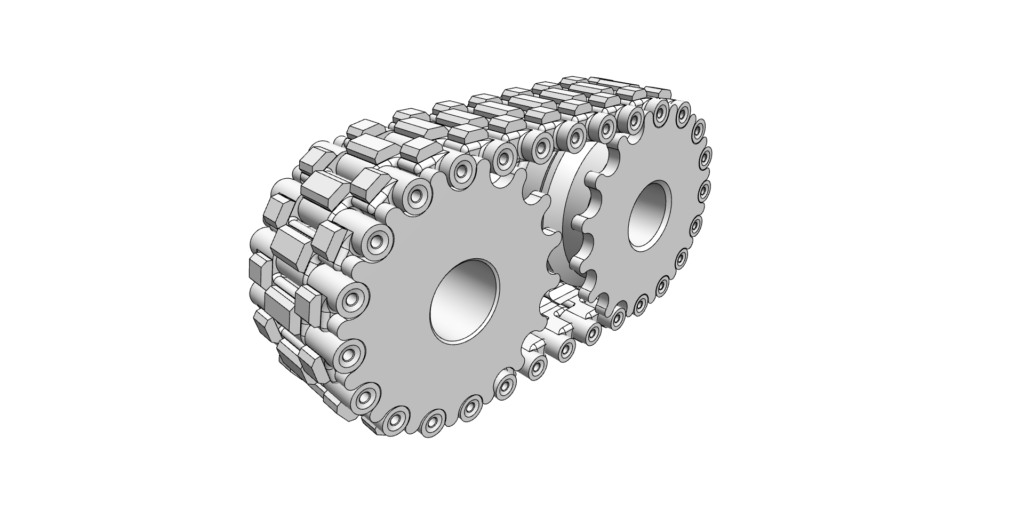
Sistem trek untuk projek ini direka berasaskan unit sproket & trek cetakan 3D yang telah didokumentasikan secara berasingan dalam Design Library (boleh rujuk di sana untuk maklumat lanjut).
Kereta kebal dengan tayar bertrek
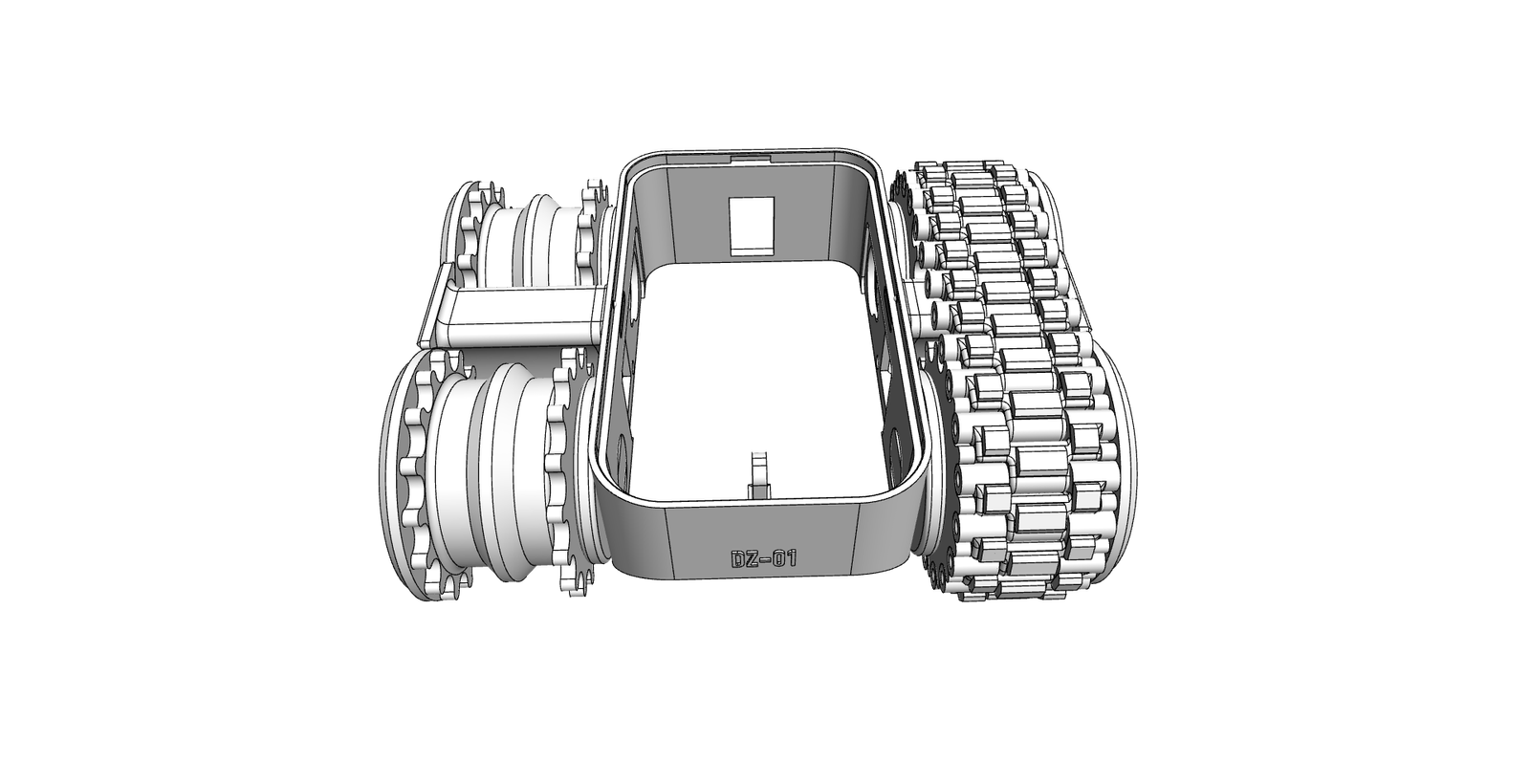
Rekabentuk sproket dan trek yang saya gunakan untuk kit robot kali ini
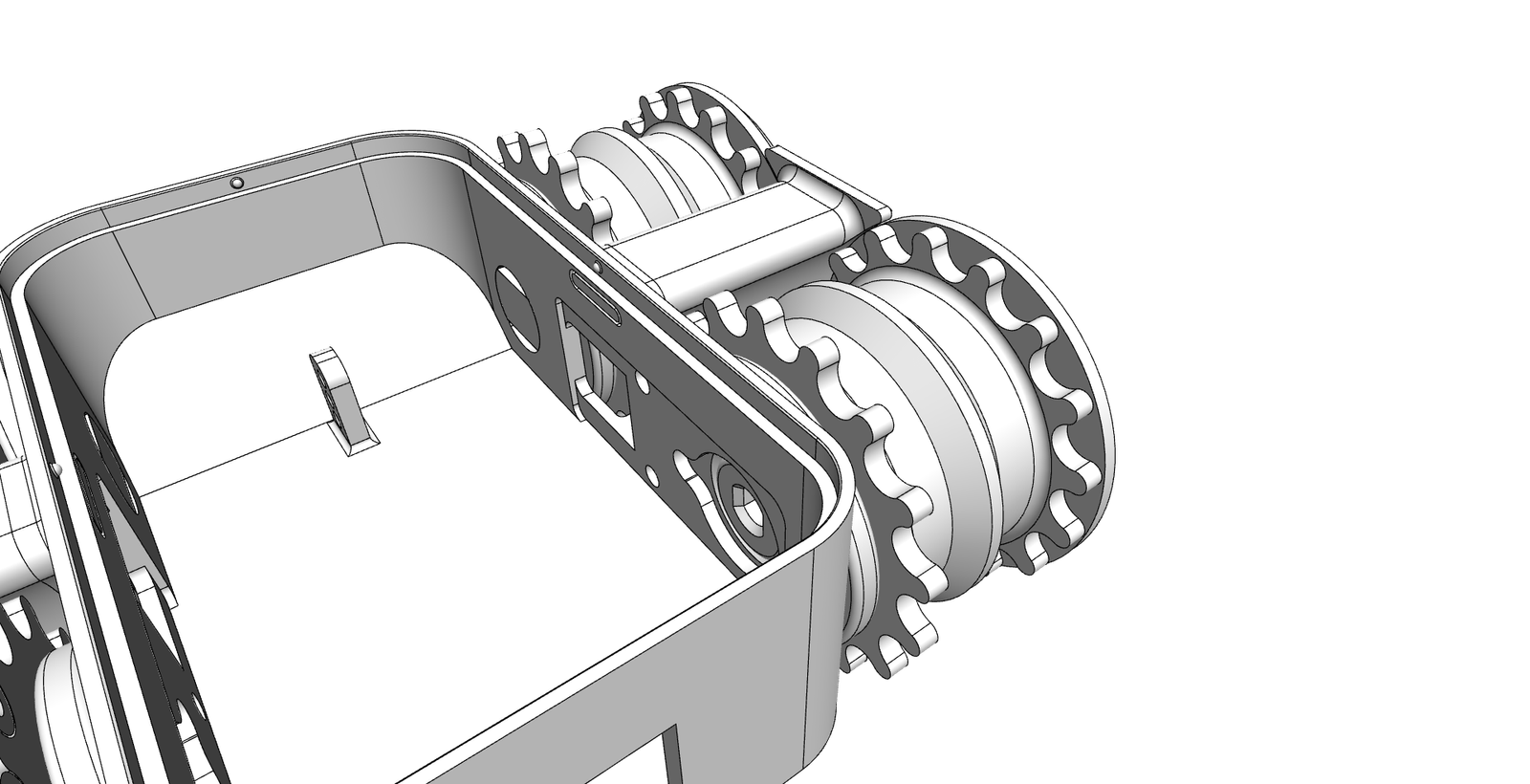
Sproket pemacu disambungkan kepada motor.
Sproket idler pula berpusing bebas pada aci(shaft).
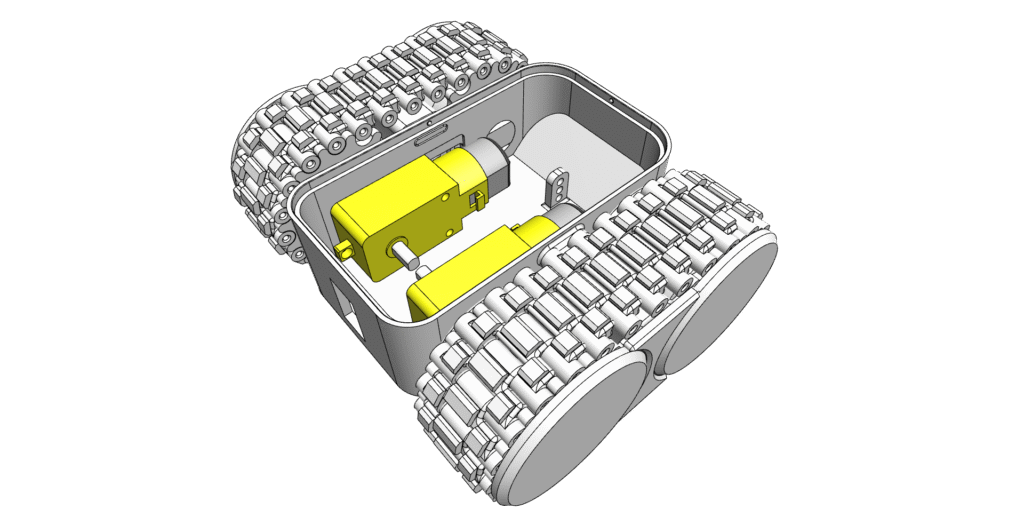
Rangka robot menempatkan komponen elektronik: motor, bateri, dan suis.
Penutup atas menempatkan komponen selebihnya.
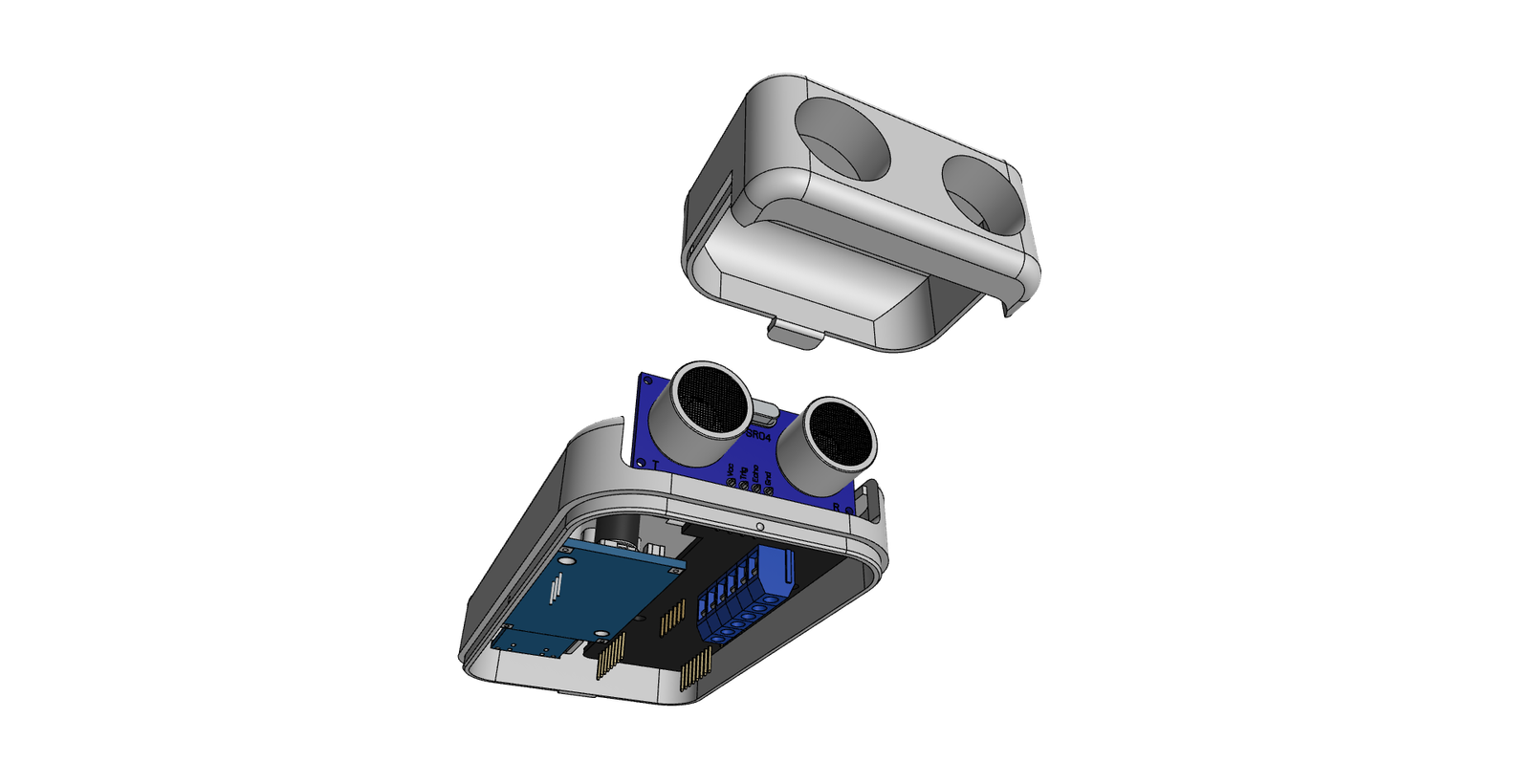
Saya juga menambah “kepala” kecil untuk menutup sensor ultrasonik, supaya ia tidak kelihatan terdedah seperti kit robot biasa.
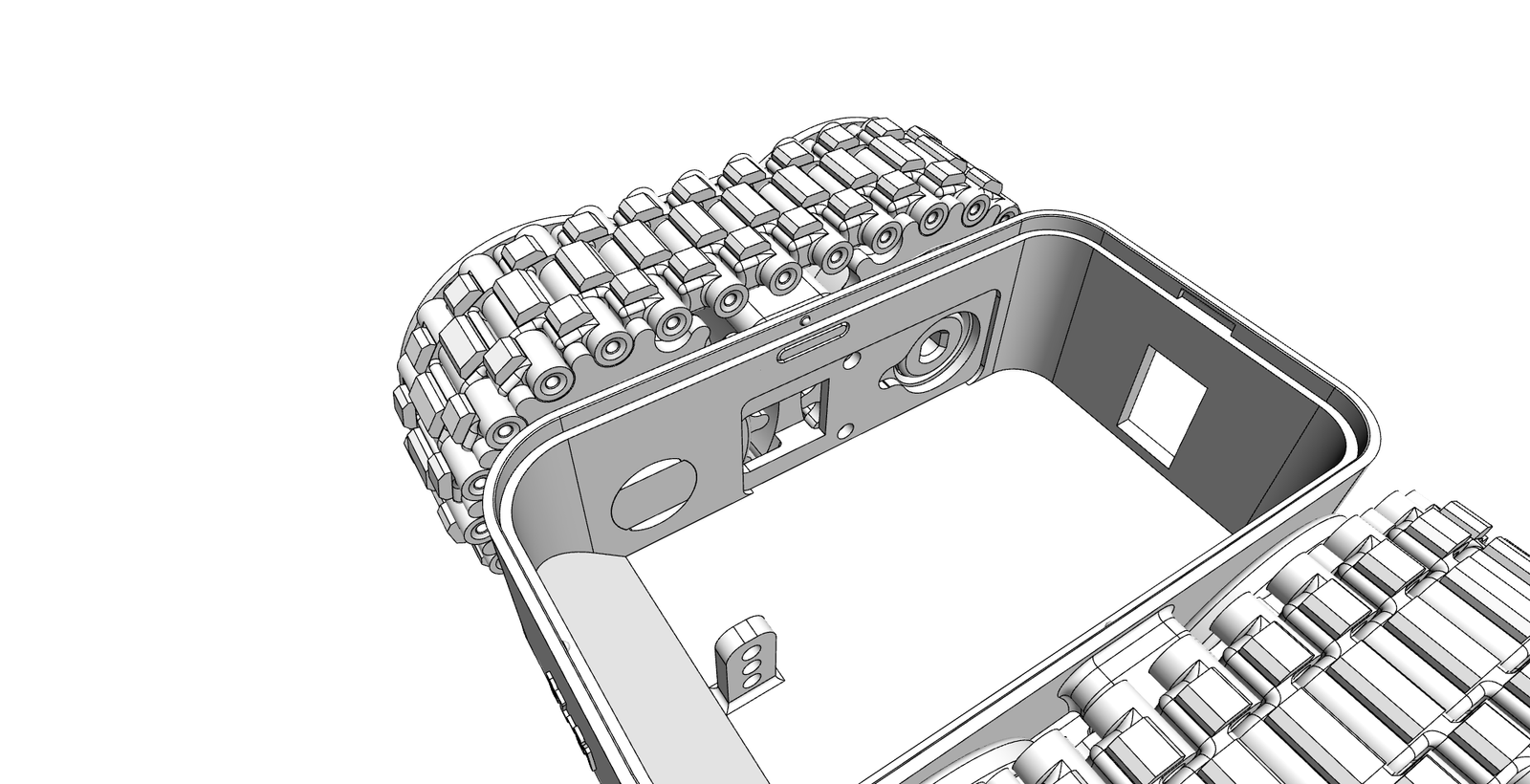
Unit sproket & trek dilekatkan pada rangka robot. Motor DC digabungkan pada sproket pemandu
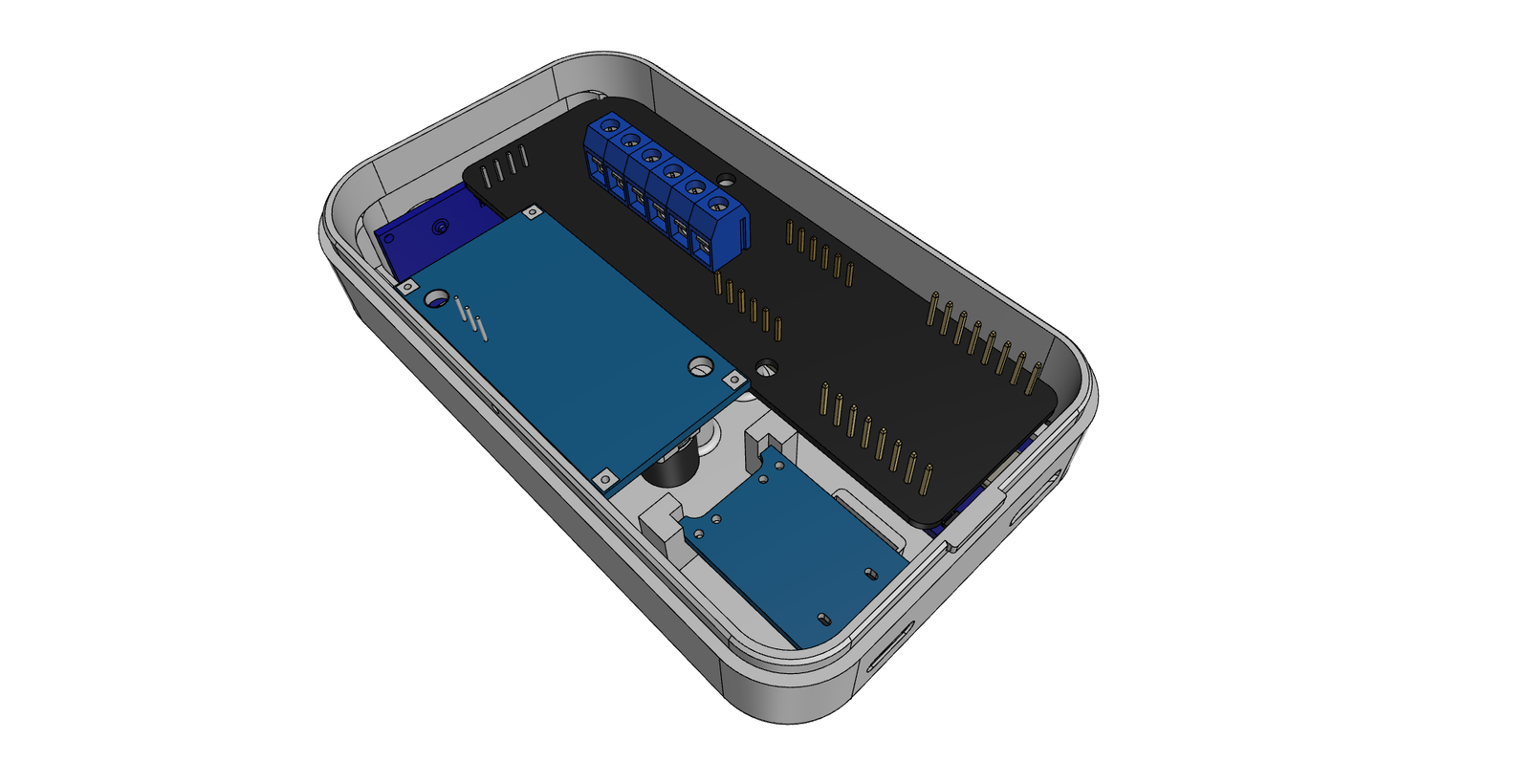
Kebanyakan komponen elektronik dipasang pada penutup atas
Electronic components mounted in upper cover
head cover is designed to slide in, covering the ultrasonic sensor
how the sprocket & tracks unit is mounted to the robot chassis
Sprocket mounting to the chassis without tracks
General overview of the lower part
PCB Tersuai (Custom PCB)
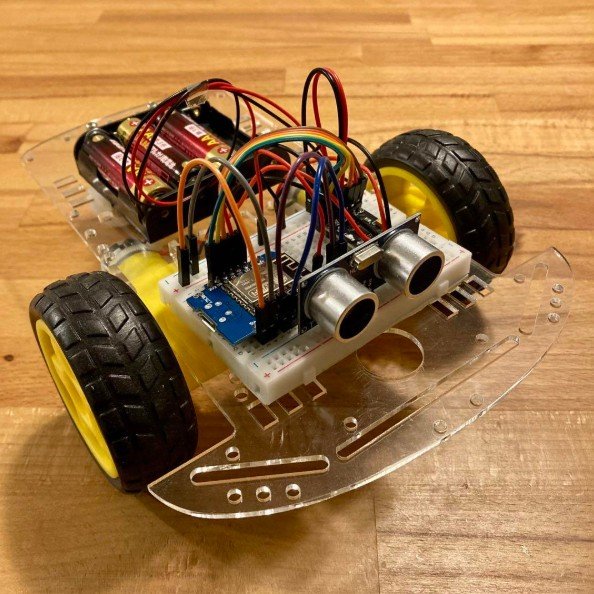
Semasa fasa prototaip, saya menggunakan breadboard dan wayar jumper — fleksibel, tetapi besar dan agak berserabut.
Prototaip 1 - kebanyakan komponen elektronik hanya dilekatkan di atas
Untuk menjadikannya lebih kemas, saya mereka bentuk sebuah PCB tersuai yang ringkas bagi menggabungkan litar antara mikropengawal, pemandu motor, dan dengan sensor. Saya bukan daripada latar belakang elektronik, tetapi selepas menonton beberapa video YouTube, saya berjaya menghasilkan satu reka bentuk PCB yang berfungsi.
Terima kasih khas kepada PCBWay kerana menaja papan litar ini. Tanpa bantuan mereka, mungkin saya tidak akan mencuba rekaan PCB sama sekali.
Skematik untuk PCB
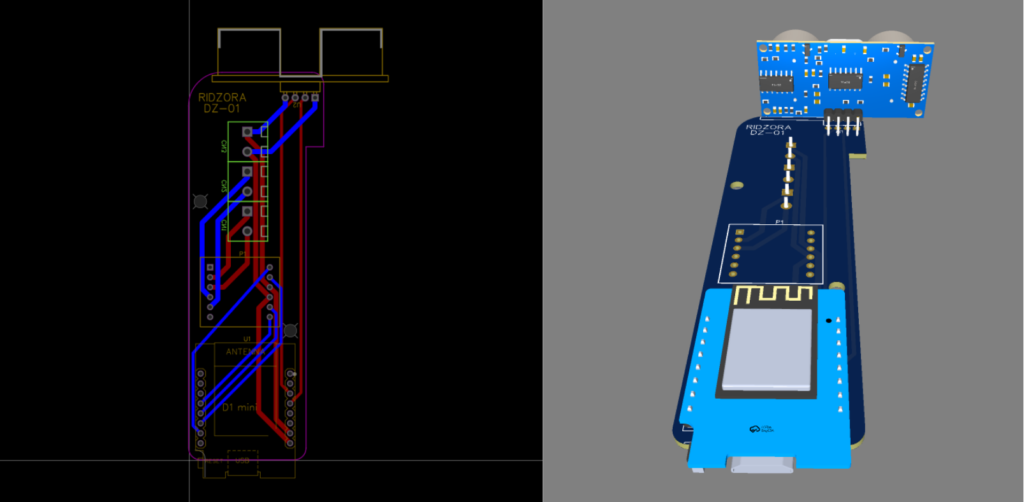
Rekabentuk PCB sebenar
Hasil Akhir
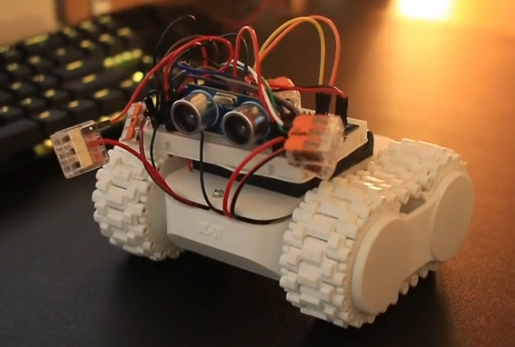
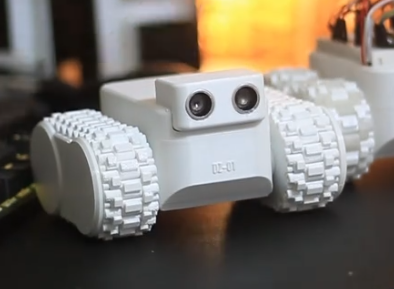
Robot yang siap kelihatan seperti yang saya inginkan — padat, kemas, dan berfungsi dengan baik.
Fail projek juga ada saya sediakan sekiranya anda ingin cuba membinanya sendiri:
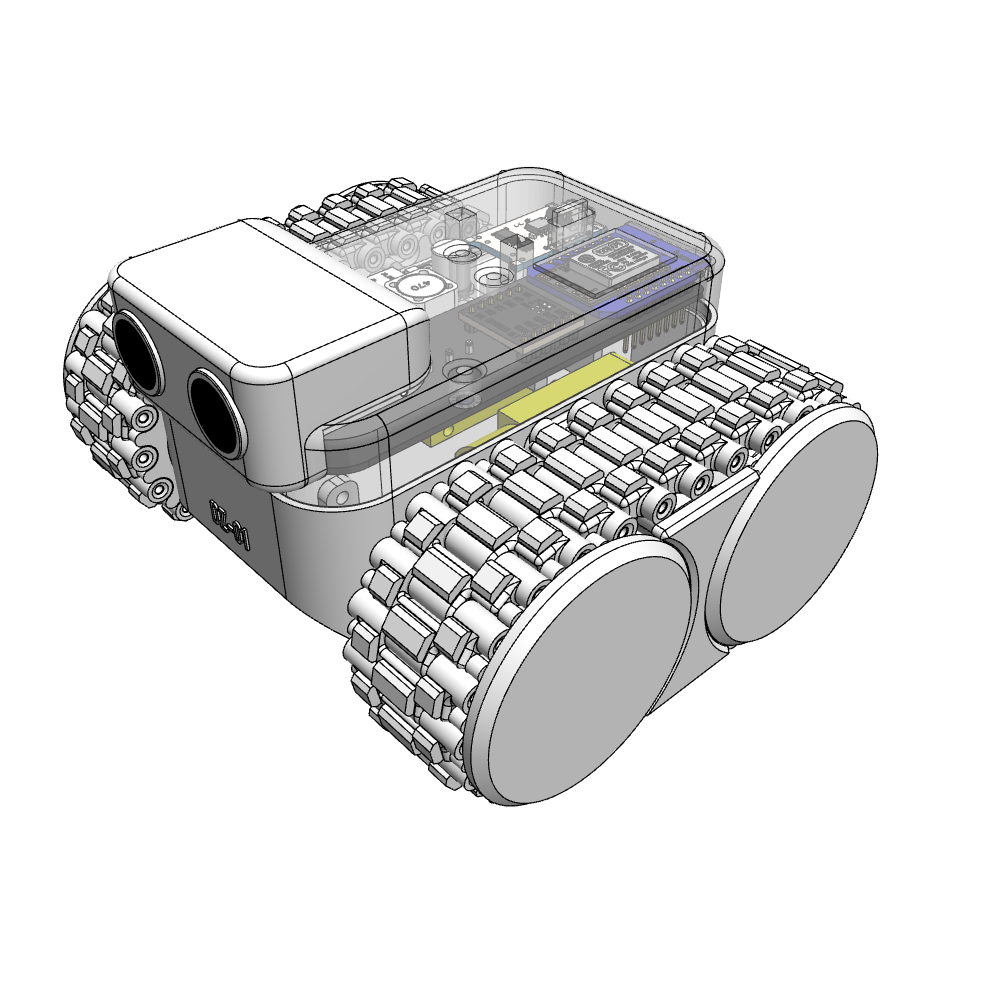
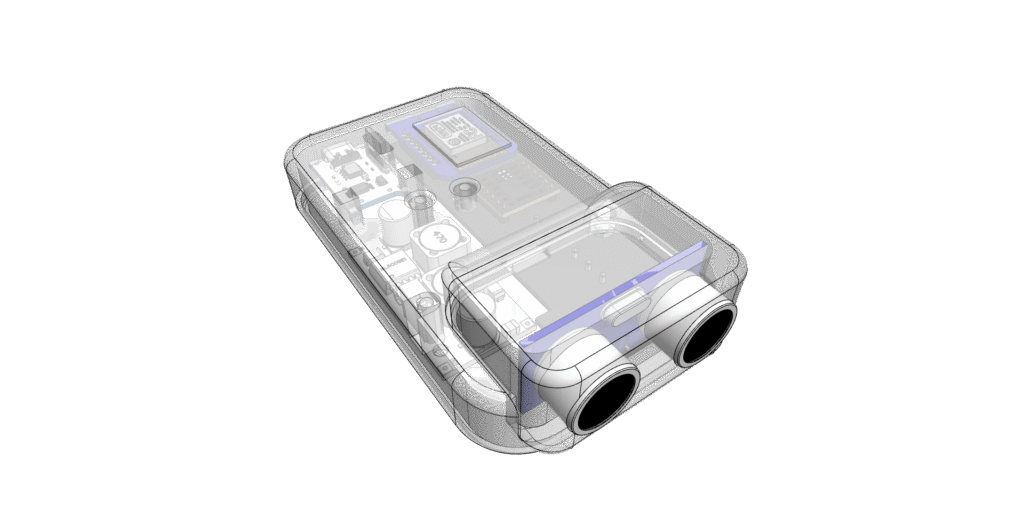
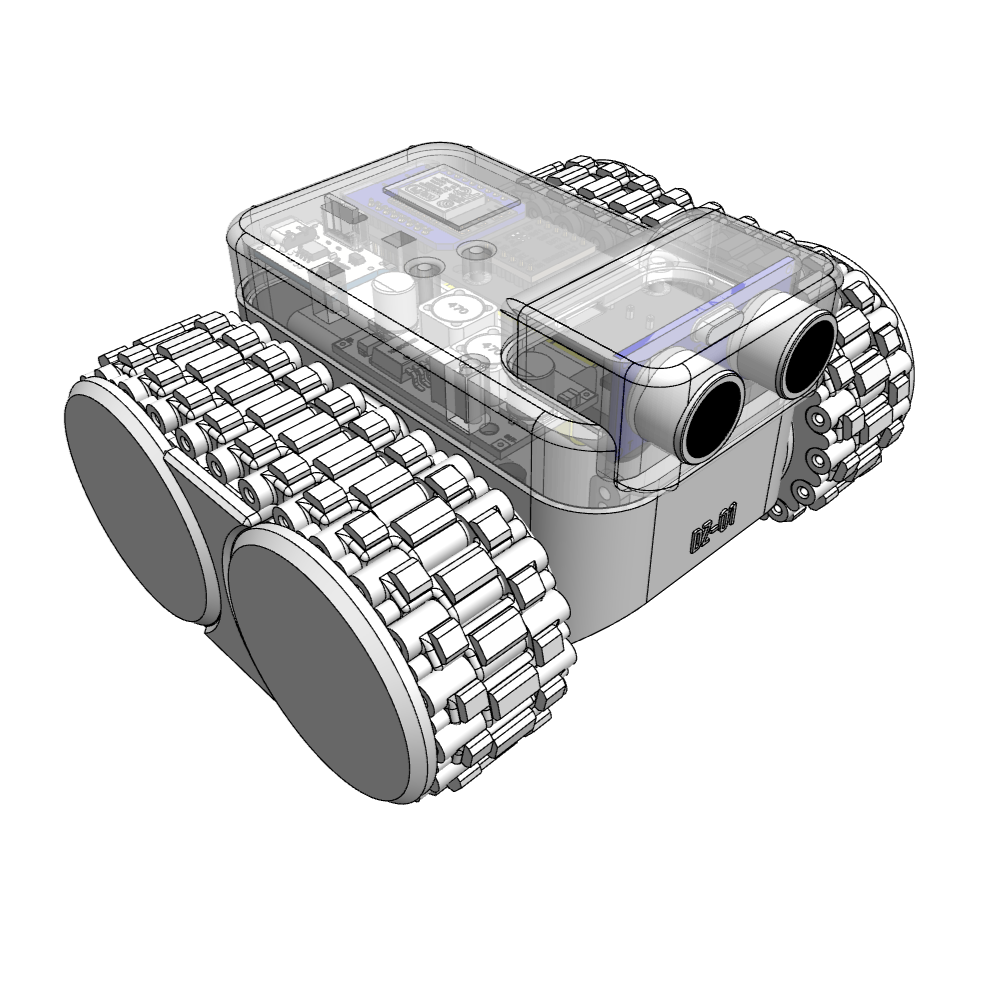
Rekabentuk CAD akhir (ilustrasi lutsinar hanya untuk menunjukkan komponen dalaman)
Hasil pembinaan robot sebenar
Pengajaran & Penambahbaikan Akan Datang
Ini merupakan cubaan pertama saya menghasilkan kit robot mudah alih. Oleh kerana latar belakang saya lebih kepada robotik industri berbanding reka bentuk produk kecil, saya dapat melihat banyak kekurangan yang boleh diperbaiki untuk projek akan datang.
Kurangkan penggunaan skru → Reka bentuk snap-fit (seperti LEGO) akan memudahkan pemasangan untuk pemula.
PCB modular → Gunakan pin header dan bukannya pateri(solder) terus komponen pada litar PCB, supaya ia lebih mudah diganti atau dinaik taraf.
Susun atur komponen → Buat masa ini, sebahagian komponen elektronik diletakkan di rangka bawah dan sebahagian lagi di penutup atas. Ini menyukarkan kerja penyelenggaraan. Untuk versi seterusnya, saya mahu semua komponen boleh dicapai dari satu bahagian sahaja.
Walaupun terdapat beberapa kelemahan seperti yang dinyatakan ini, saya tetap berpuas hati dengan hasilnya. Robot ini berfungsi dengan baik, kelihatan menarik, dan memberikan saya banyak pengalaman baru.