Kami akan pergi ke Hokkaido sempena cuti Obon 2025, tapi kami ada satu masalah. Pokok bunga seri pagi yang anak kami bawa pulang dari tadika dia perlu disiram setiap hari. Tapi tak ada orang di rumah untuk bantu siram pokok tersebut.
Jadi saya cuma ada satu penyelesaianーbina satu sistem siram pokok automatik.
Bagaimana untuk bina sistem siram pokok automatik?
Secara ringkasnya, ia hanyalah gabungan pam air + penentu masa (timer) + tangki air.
Pam air mini boleh dibeli dengan mudah secara online, kemudian dicabungkan dengan litar yang mempunyai mikropengawal (microcontroller) dan pemandu motor (motor driver).
Logiknya sangat mudah: mikropengawal akan mengira masa, dan bila tempoh yang ditetapkan tiba, ia akan menghantar isyarat kepada pemandu motor untuk menggerakkan pam air mini. Apabila pam bergerak, air akan disedut dan disalurkan melalui tiub untuk menyiram pokok.
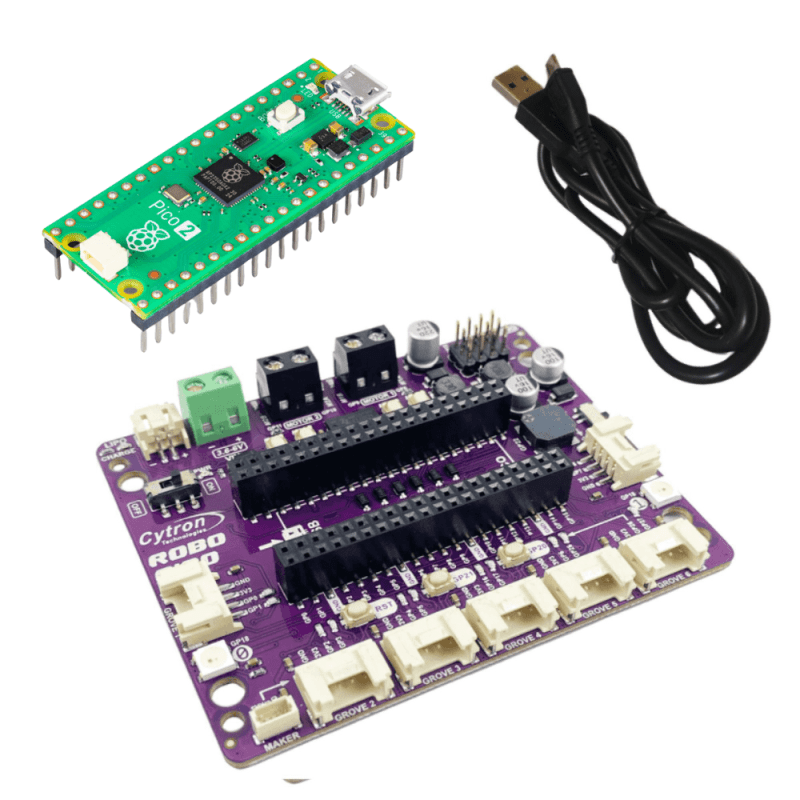
Bagi projek ini, saya bernasib baik kerana mempunyai Robo Pico daripada Cytron Technologies. Litar ini telah menggabungkan mikropengawal, pemandu motor dan terminal penyambung dalam satu papan.
Hasilnya, sambungan jadi lebih kemas — hanya perlu sambung dua wayar pam air mini kepada terminal Robo Pico, dan litar sudah pun lengkap.
Langkah terakhir hanyalah menulis kod ringkas yang mengawal bila pam perlu dihidupkan. Untuk projek ini, logik yang digunakan ialah: pam akan beroperasi selama 10 saat setiap 12 jam.
Komponen Utama Projek Ini
Pam Air Mini + Tiub → menghantar air ke pokok
Raspberry Pi Pico → menjalankan kod kawalan (bertindak sebagai otak sistem)
Papan Robo Pico → menghubungkan mikropengawal dan pam ar mini
Bateri Litium-Ion → sumber kuasa
Botol Mineral 2L → tangki air
Pam air mini
Robo Pico x Raspberry Pi Pico
Battery Li-Ion
Komponen Tambahan
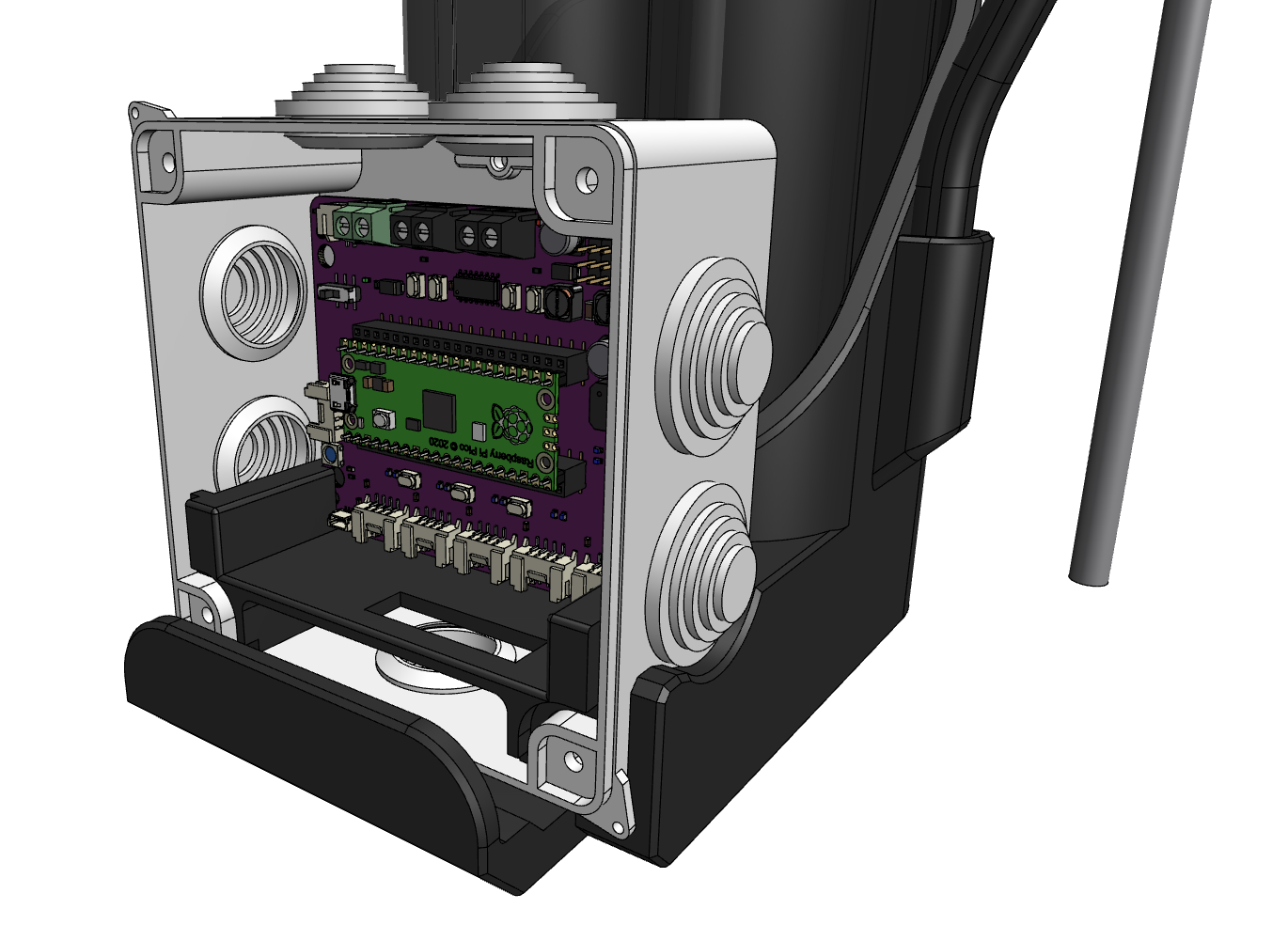
Kotak Kalis Air ZYPOLA (IP65) → melindungi komponen elektronik
Wayar & Penyambung → sambungan asas
Kotak zypola
Rekabentuk Mekanikal
Sistem ini memerlukan tiga bahagian mekanikal utama:
Tapak (Base) → memegang botol dan kotak kalis air dengan stabil
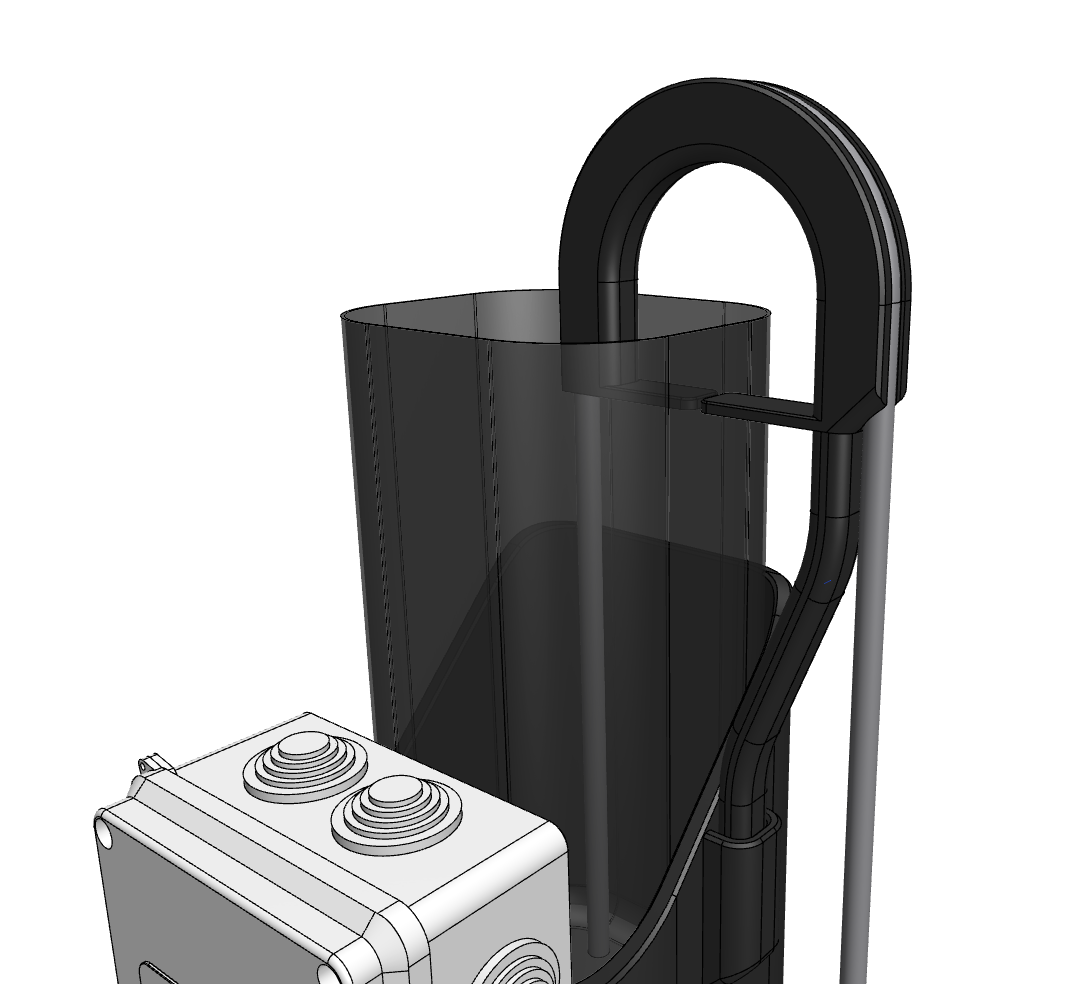
Lengkung Separuh Bulatan (Semi-circular Arc) → membimbing tiub supaya tidak membengkok tajam
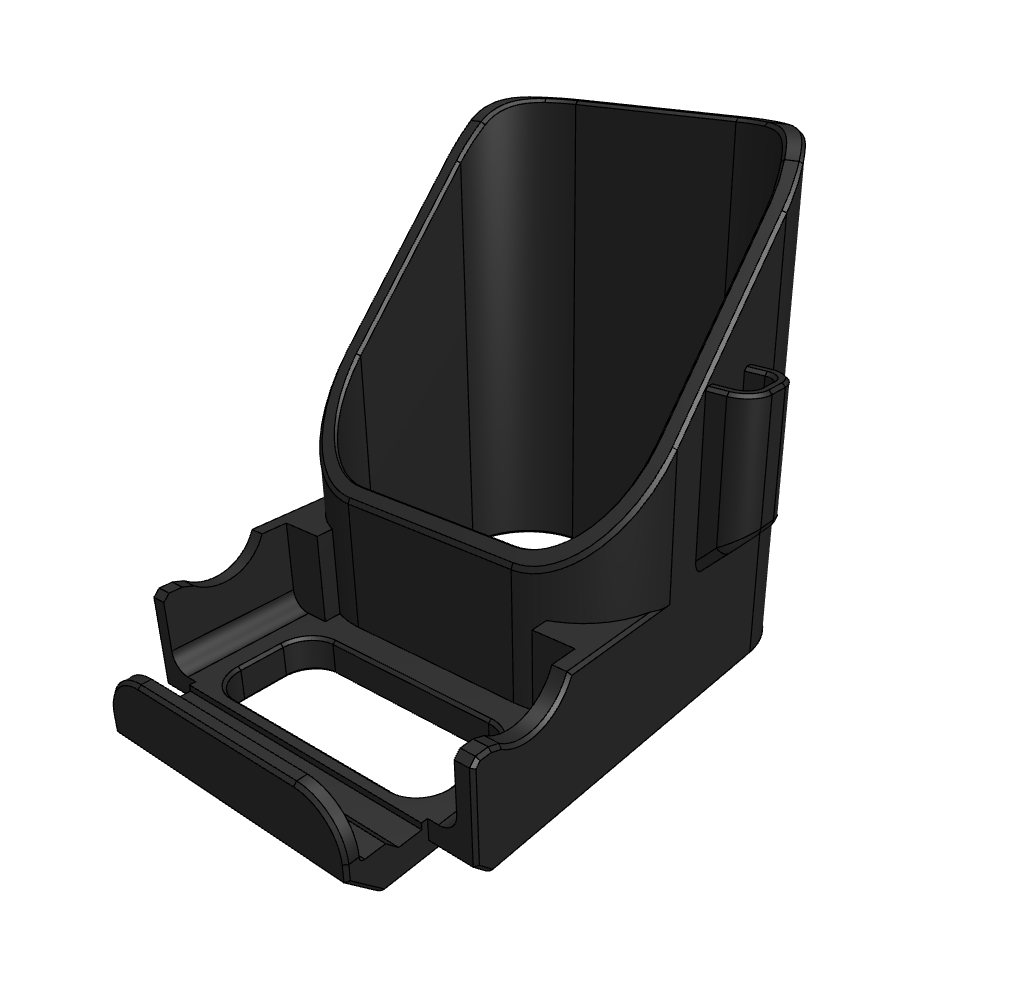
Pemegang Papan (Board Holder) → membolehkan Robo Pico dimasukkan dengan kemas ke dalam kotak
Pada mulanya, saya menggunakan bateri LiPo 2000 mAh, tetapi ia tidak mampu bertahan selama 5 hari. Akhirnya saya menggantikannya dengan bateri litium-ion daripada lampu solar saya. Walaupun kapasiti bateri tersebut tidaklah terlampau tinggi, tapi lebih baik daripada pilihan bateri asal saya.
Tapak yang menempatkan majoriti komponen
Lengkung separuh bulatan di sisi tapak
Pemegang Robo Pico
Pengaturcaraan
Satu program ringkas dalam Python digunakan untuk menghidupkan pam secara automatik selang 12 jam:
import board
import time
import digitalio
# Pump motor connected to GP10 (black), GP11 (red)
motorA1 = digitalio.DigitalInOut(board.GP10)
motorA2 = digitalio.DigitalInOut(board.GP11)
motorA1.direction = digitalio.Direction.OUTPUT
motorA2.direction = digitalio.Direction.OUTPUT
def pump_on():
motorA1.value = False
motorA2.value = True
def pump_off():
motorA1.value = False
motorA2.value = False
# Wait 10 seconds after Raspberry Pi starts
print("Waiting 10 seconds before starting...")
time.sleep(10)
while True:
print("Pump ON for 10 seconds")
pump_on()
time.sleep(10)
pump_off()
print("Pump OFF")
time.sleep(43200) # Wait before running again
Hasil Akhir
Sistem yang dibuat ini berfungsi dengan baik, dan Alhamdulillah pokok bunga anak saya masih hidup selepas kami pulang dari percutian kami.
Kapasiti bateri → Walaupun menggunakan bateri litium-ion boleh cas semula dengan solar, ia hampir tidak cukup untuk memastikan sistem hidup selama 5 hari berturut-turut. Penyelesaian yang lebih baik ialah menyambung elektrik terus daripada soket rumah, atau menukar kepada bateri dengan kapasiti lebih tinggi.
Kesan sifon → Saya langsung terlupa tentang hal ini semasa mereka bentuk sistem. Oleh kerana tiub dibimbing ke bawah dan hujungnya berada lebih rendah daripada paras air dalam takungan, kesan sifon berlaku. Akibatnya, air terus mengalir walaupun pam sudah dimatikan. Penyelesaian segera saya ialah mengikat hujung tiub lebih tinggi daripada paras air — tetapi ini sekaligus menafikan fungsi lengkung separuh bulatan yang saya buat.
Sensor kelembapan tanah → Robo Pico yang saya gunakan datang bersama beberapa aksesori tambahan, termasuk sensor kelembapan tanah. Secara teori, saya boleh gunakannya untuk mengukur tahap kekeringan tanah dan menghidupkan pam hanya bila diperlukan, dengan ambang yang boleh ditetapkan sendiri. Untuk satu pokok kecil, ini agak berlebihan — tetapi ia tetap idea menarik untuk dicuba pada versi seterusnya.