Most beginner robotic kits on the market focus heavily on electronics and software, while the mechanical parts are kept simple. That makes sense considering the goal of these kits is to teach coding and circuit connection.
But robotics is more than just circuits and code. The mechanical side is just as important, and in my opinion, it should look cool too.
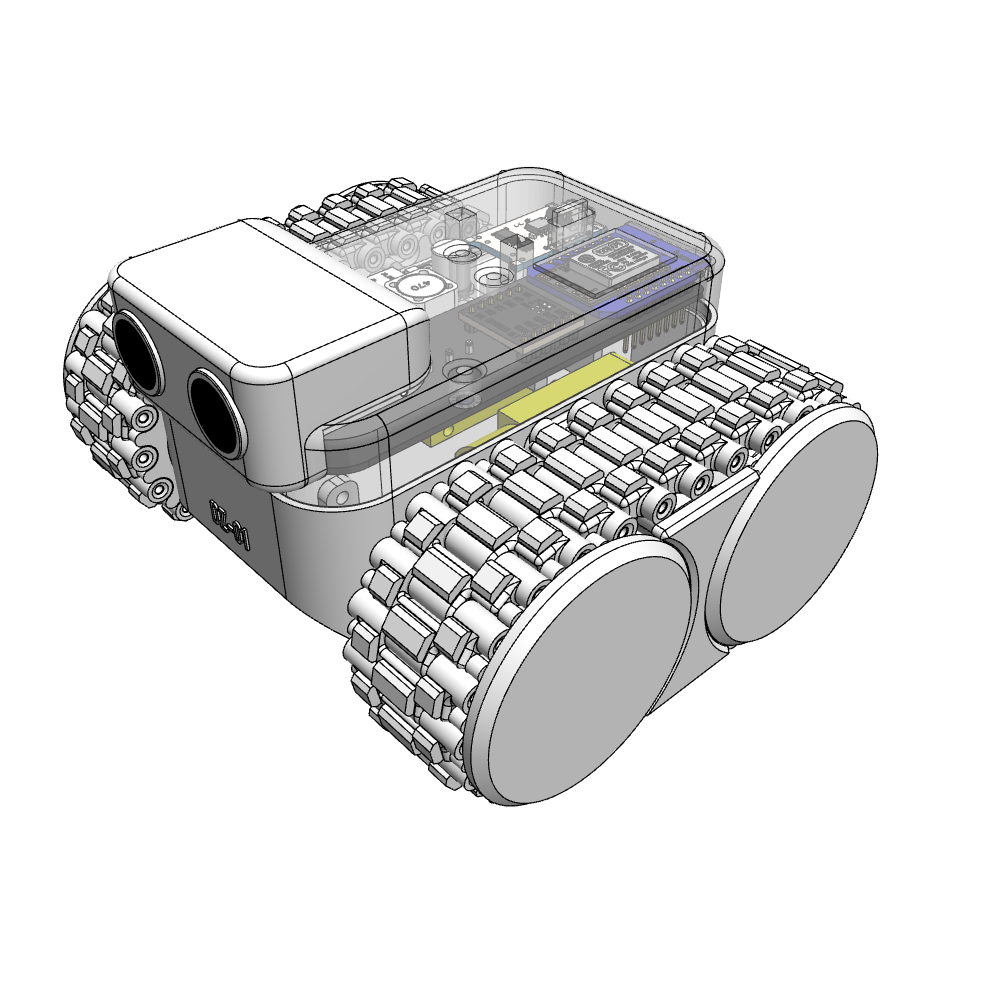
So, my goal with this project was to design a DIY 3D printed tracked robot (DZ01) that isn’t only functional, but also visually pleasing — something that feels more exciting than the standard starter kits.
Standard robotic kit that I bought. Simple plate, exposed components, messy wires.
What Makes a Robot?
To simplify: a robot is a machine that can “think” on its own.
A radio-controlled car has motors and servos, but it only moves when you push buttons. Without you, it does nothing.
A robot, on the other hand, follows a program. Press a button and it runs code inside its “head” (microcontroller), which tells it what to do.
For example:
If programmed to move forward unless there’s an obstacle within 50mm, it will keep driving until its ultrasonic sensor detects something closer than 50 mm.
At that point, the code tells it to stop — automatically, without your remote.
That’s what makes it a robot: the ability to act based on programmed logic and sensor feedback.
Core Components of the Robot
Microcontroller (acting as the brain)
WeMos D1 Mini → runs the robot code
Actuators
2× DC Motors → drive the tracks
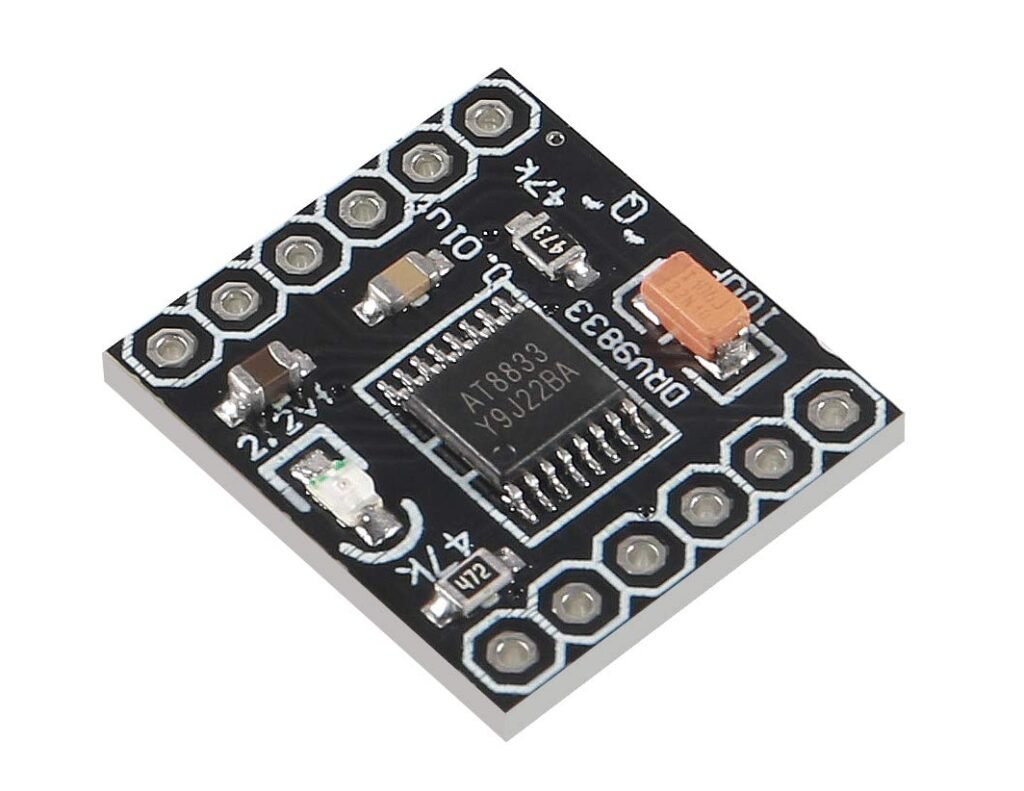
Motor Driver
DRV8833 → controls current & speed of DC motors
Sensor
HC-SR04 Ultrasonic Sensor → detects obstacles
Power
3.7V 2000 mAh LiPo Battery → rechargeable supply
WeMos D1 Mini
DC Motor
DRV8833
HC-SR04
LiPo Battery
Supporting Components
XL6009 Boost Converter → steps up the 3.7 V battery to ~5 V, which most components need.
TP4056 Charging Module → allows USB-C charging for the battery.
Power Switch → lets me cut the power easily.
And of course, to bring everything together: mechanical parts — body, frame, cover. That’s where mechanical design really matters.
Mechanical Design
I wanted this robot to look like a mini-tank, because tanks are cool and tracks make them even cooler.
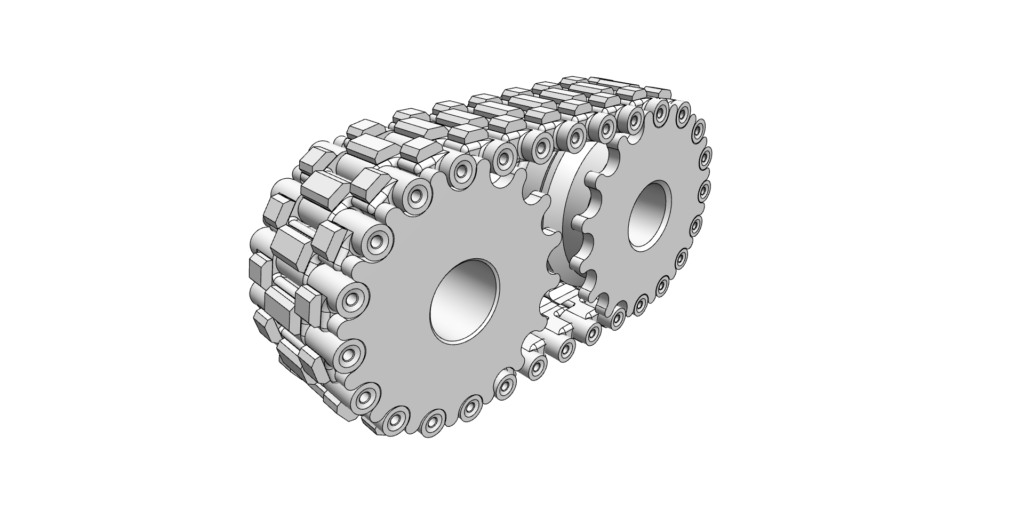
The track system was designed based on my 3D-printed sprocket & track unit (documented separately on design library, learn more about it here).
A tank with tracked wheels
The sprocket and tracks unit design that I opted for the robotic kit in this project
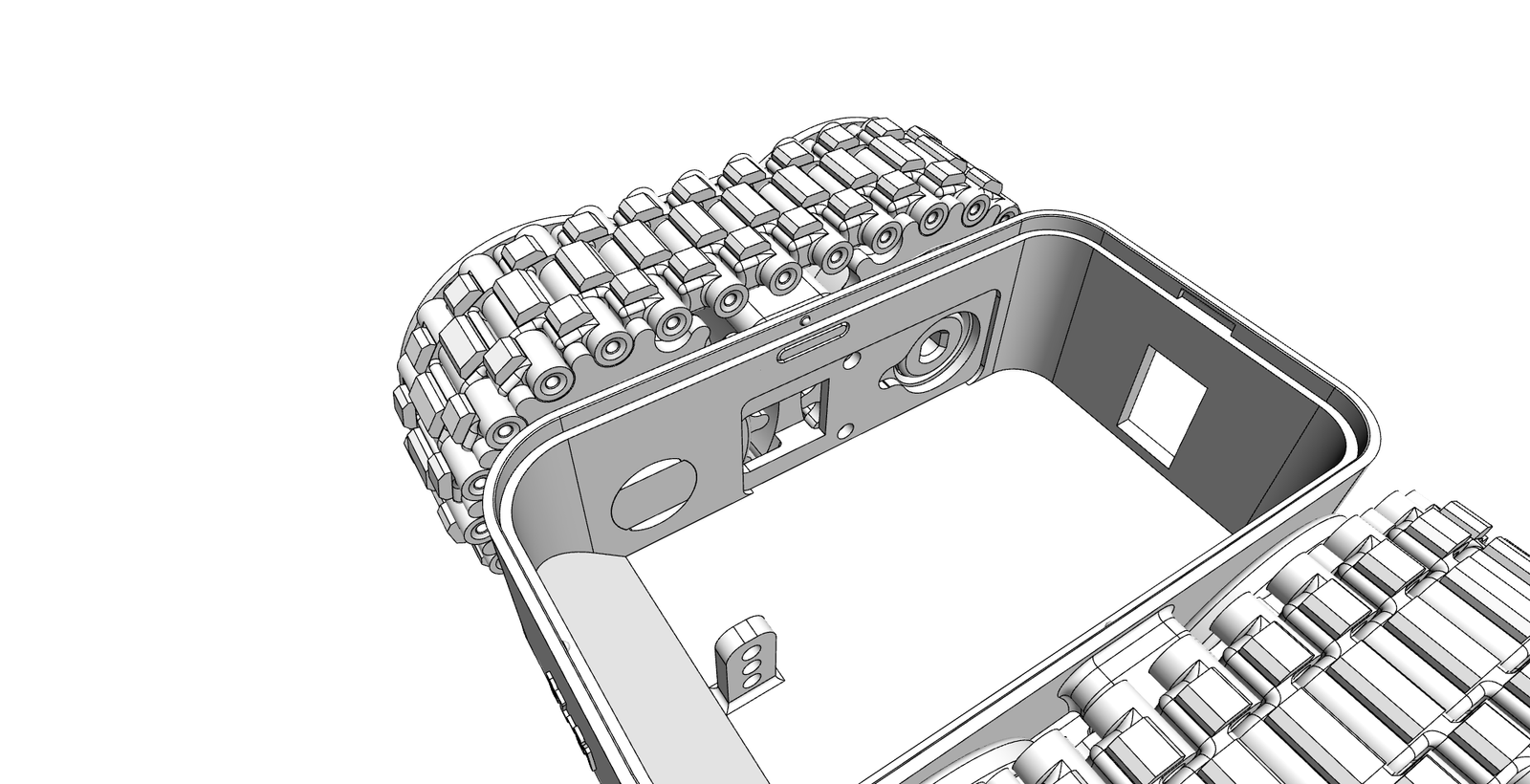
The drive sprockets are connected to the motors, while idler sprockets rotate freely on shafts.
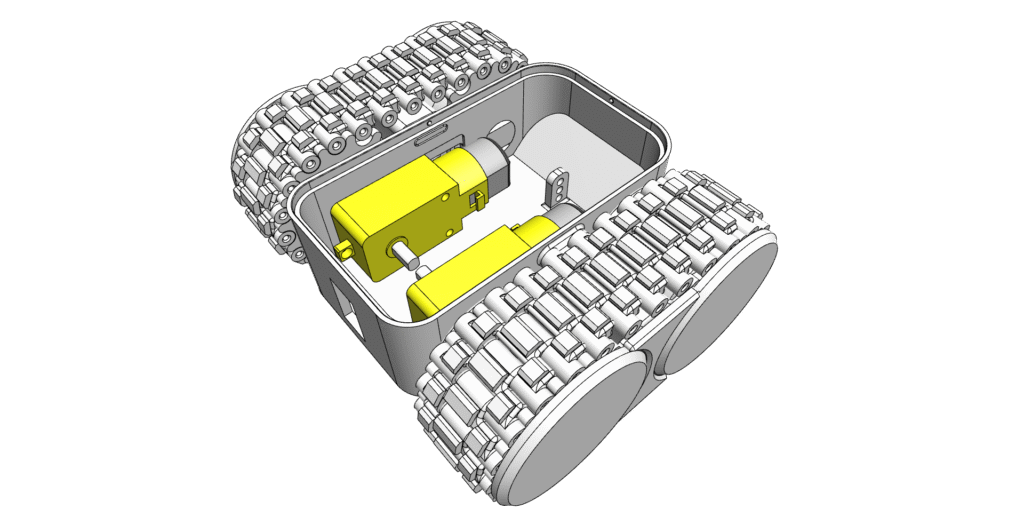
The robot frame houses the electronics: motors, battery, and switch.
A cover shell holds the rest of the components.
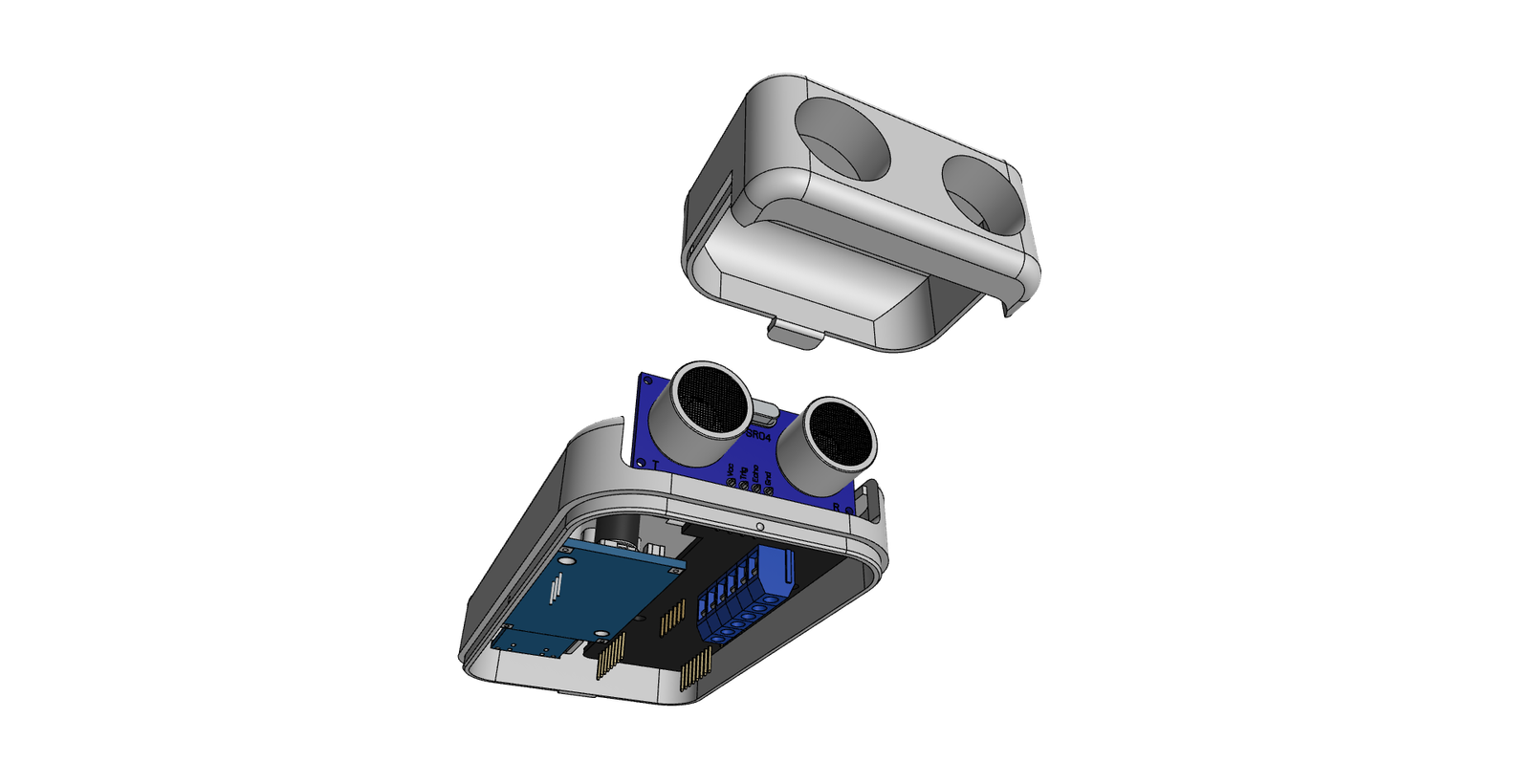
I even added a small “head” for the ultrasonic sensor, so it doesn’t look bare like most starter kits.
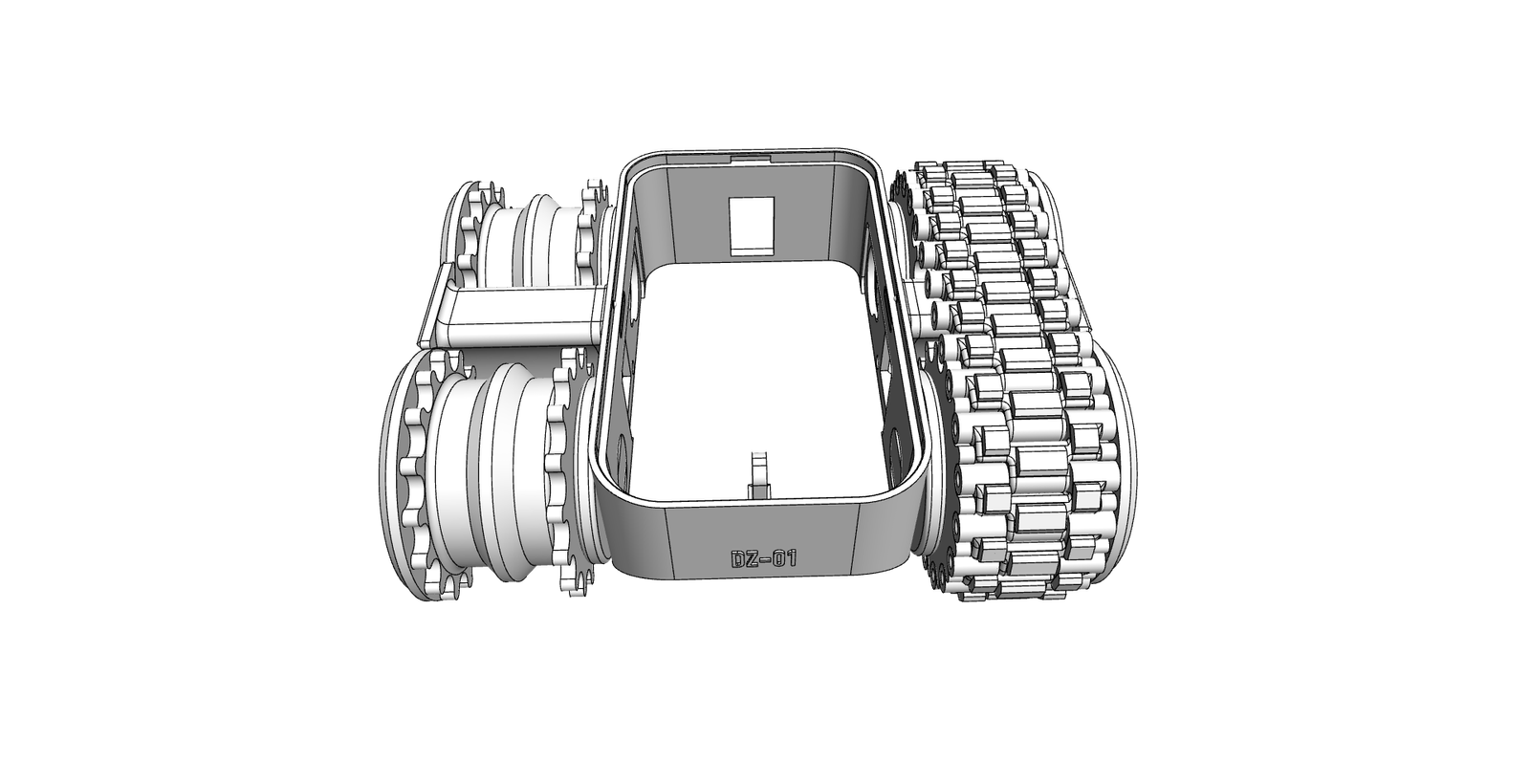
Sprocket & tracks units are attached to robot frame. DC Motors are connected to the driver sprockets
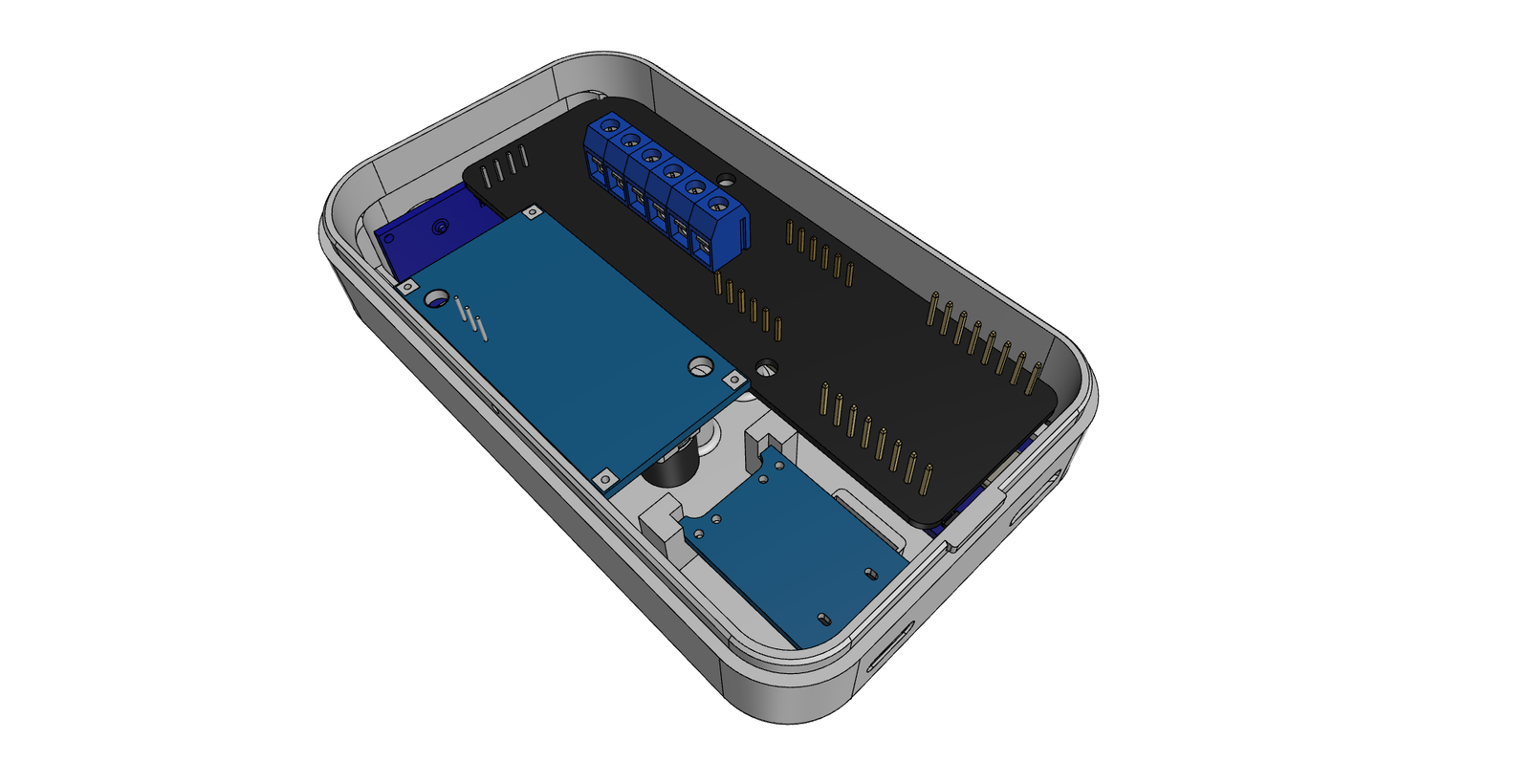
Upper shell holds most of the components
Electronic components mounted in upper cover
head cover is designed to slide in, covering the ultrasonic sensor
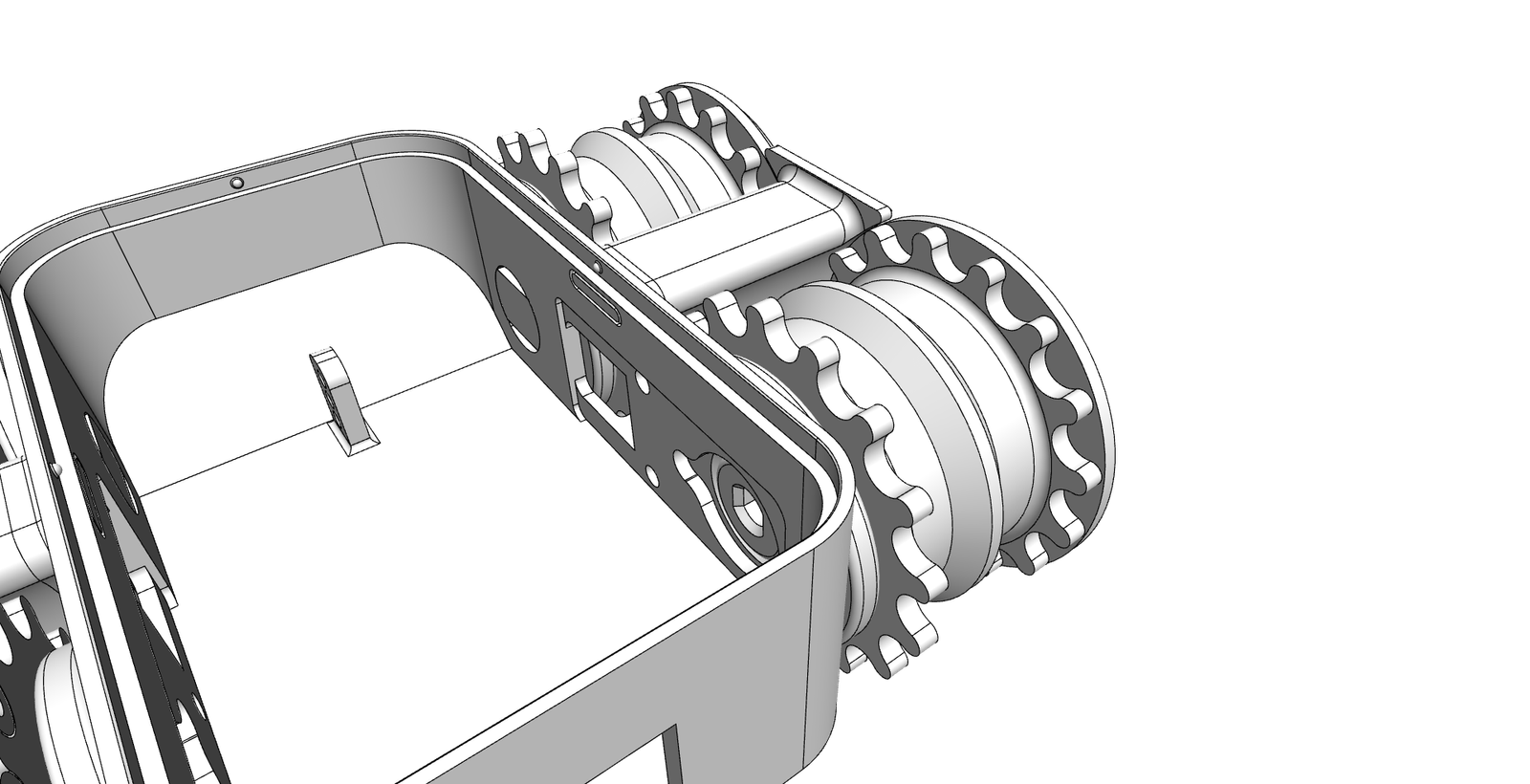
how the sprocket & tracks unit is mounted to the robot chassis
Sprocket mounting to the chassis without tracks
General overview of the lower part
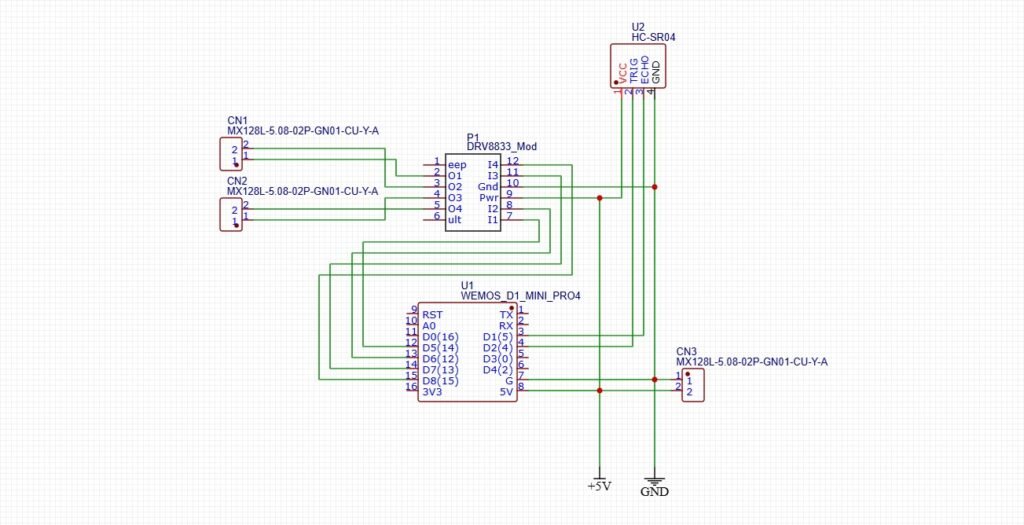
Custom PCB
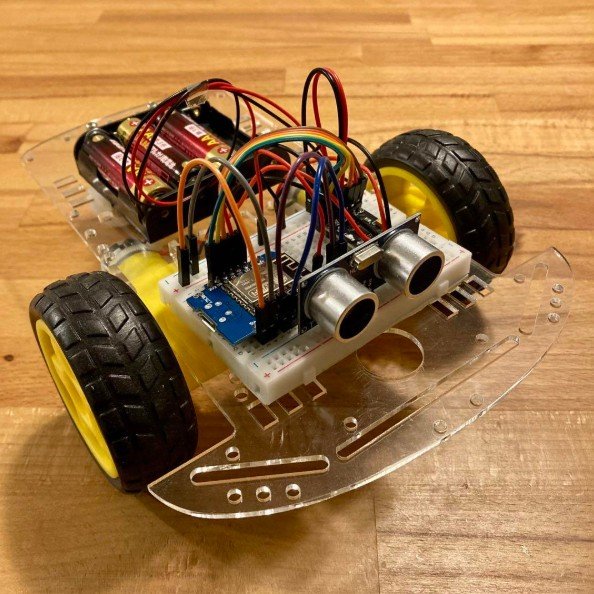
During prototyping, I used a breadboard and jumper wires — flexible, but bulky and messy.
Prototype no 1
To clean things up, I designed a simple custom PCB to integrate the microcontroller, motor driver, and sensor connections. I’m not an electronics guy, but after some YouTube studying, I managed to design something that worked.
Special thanks to PCBWay for sponsoring the board. Without their help, I probably wouldn’t have tried PCB design at all.
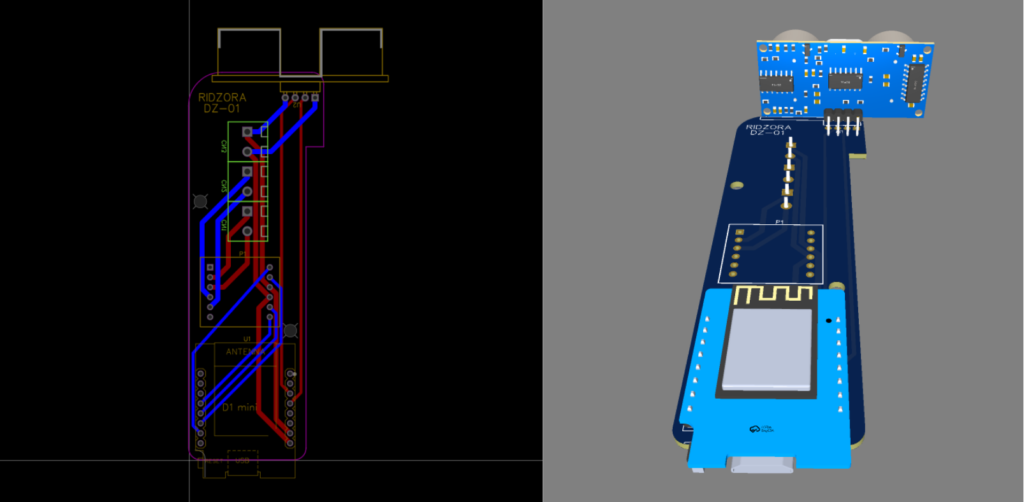
Schematic for PCB
The actual PCB design
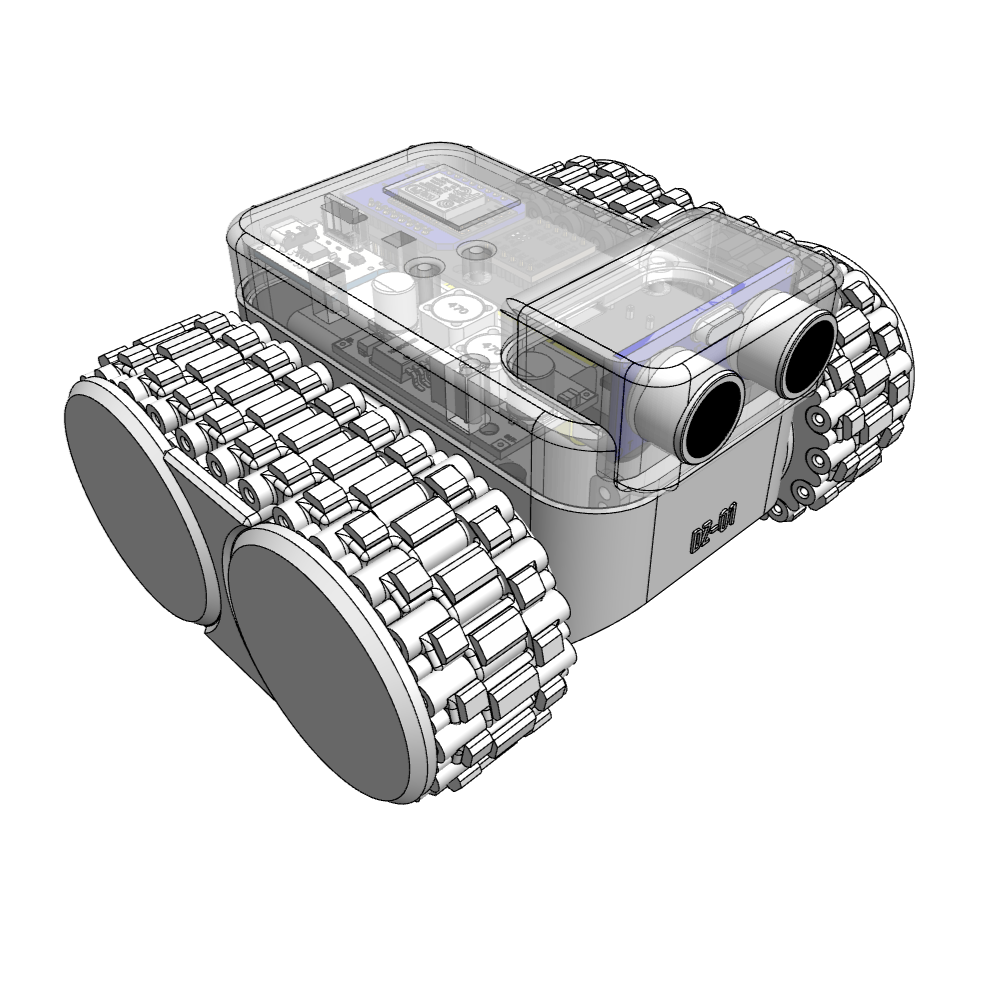
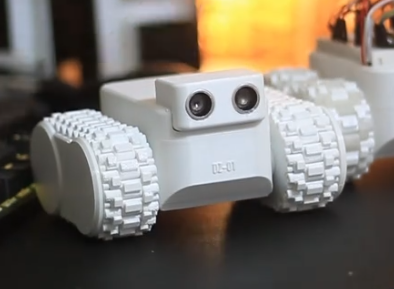
Final Result
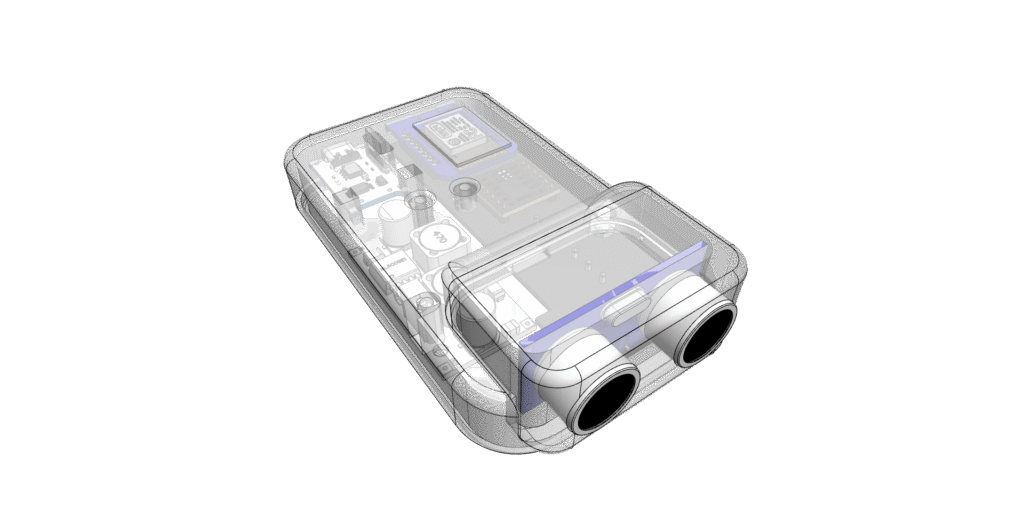
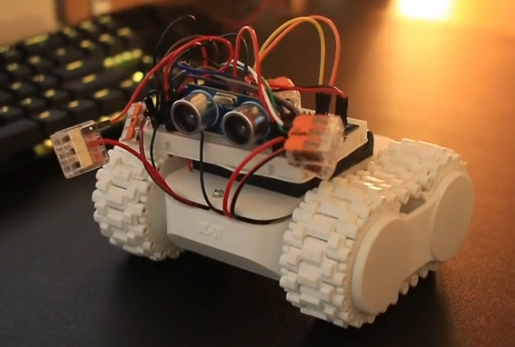
The finished robot came out just as I imagined — compact, neat, and functional.
The files are available if you want to try building your own:
Final CAD design (transparent illustration is just to show inner componenets)
Real final built
Problems & Future Improvements
This was my first attempt at creating a mobile robot kit. Since my background is mainly in industrial robotics instead of product design, I can already see plenty of areas to improve when working on a smaller product like this.
Fewer fasteners → A snap-fit design (like LEGO) would make assembly easier for beginners.
Modular PCB → Use header pins instead of soldering components directly, so they can be replaced or upgraded.
Component layout → Right now, some electronics are in the base and others in the cover, which makes maintenance harder. In the next version, I’d like everything accessible from one side.
Even with these weaknesses, I’m satisfied with the result. The robot works, looks cool, and taught me a lot.